实现串口中断接收
通过前面的学习我们已经调试好了串口SIO驱动发送功能、中断系统和系统TICK功能,现在最小系统已经被我们完成了90%了,就剩最后一步我们需要实现串口使用中断接收数据的功能,这样我们才能在shell上输入命令和SylixOS进行交互。
要实现串口接收功能我们需要在uart.c中实现3个接口:
VOID uartGetChar (PCHAR pcChar)
{
*pcChar = readb(UART0_BASE + RBR);
}
BOOL uartIsRcvFifoEmpty (VOID)
{
return (!(readl(UART0_BASE + USR) & BIT(3)) ? TRUE : FALSE);
}
VOID uartEnableRcvInt (VOID)
{
writel(readl(UART0_BASE + LCR) & ~BIT(7), UART0_BASE + LCR);
writel(BIT(0), UART0_BASE + IER);
}
- uartGetChar:这个接口从寄存器中读取一个字节数据。
- uartIsRcvFifoEmpty:用于检测接收FIFO中是否有数据,全志R16使用的是16550兼容的UART控制器,发送和接收都有64字节的FIFO进行缓冲。当收到数据时,数据首先存放到接收FIFO中,当数据个数满足事先设置的阈值(默认是1个字节)时产生一个中断。
- uartEnableRcvInt:使能UART控制器的接收中断。
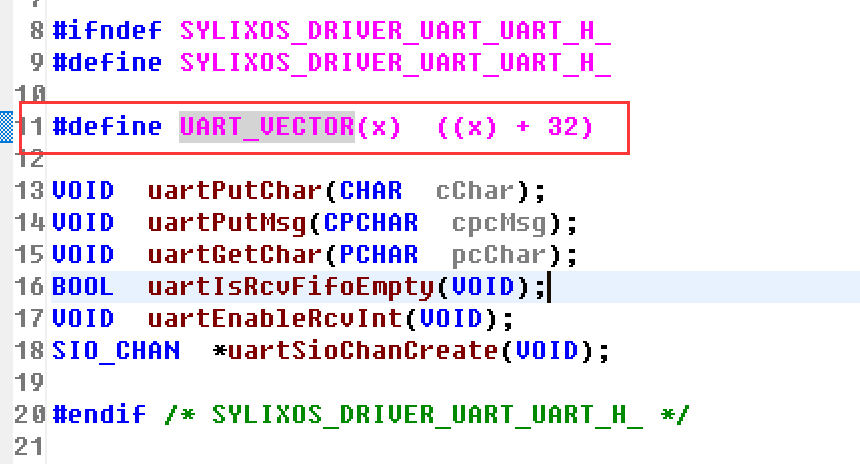
同时将串口中断号使用宏定义在uart.h中以让外部文件使用:
接下来我们就要在sio.c中实现串口接收中断处理函数了:
static irqreturn_t uartSioIsr (PVOID pArg, ULONG ulVector)
{
CHAR cChar;
/*
* TODO:清除中断
*/
while (!uartIsRcvFifoEmpty()) {
uartGetChar(&cChar);
uartPutRcvChar(pRxArg, cChar);
}
return (LW_IRQ_HANDLED);
}
逻辑也很简单,首先判断接收FIFO中是否有数据,如果有数据就从中读取一个数据,再通过uartPutRcvChar 接口把接收的数据上送到系统接收缓冲区。有的UART控制器可能需要在中断处理函数中清除中断状态,但是全志R16使用的UART控制器不需要。
中断处理函数编写完成之后,通过API_InterVectorConnect 接口注册到系统中:
SIO_CHAN *uartSioChanCreate (VOID)
{
uartSioChan.pDrvFuncs = &uartSioDrvFunc;
API_InterVectorConnect(UART_VECTOR(0),
(PINT_SVR_ROUTINE)uartSioIsr,
NULL,
"uart_isr");
return &uartSioChan;
}
最后将中断使能的操作放在打开SIO通道的ioctl中:
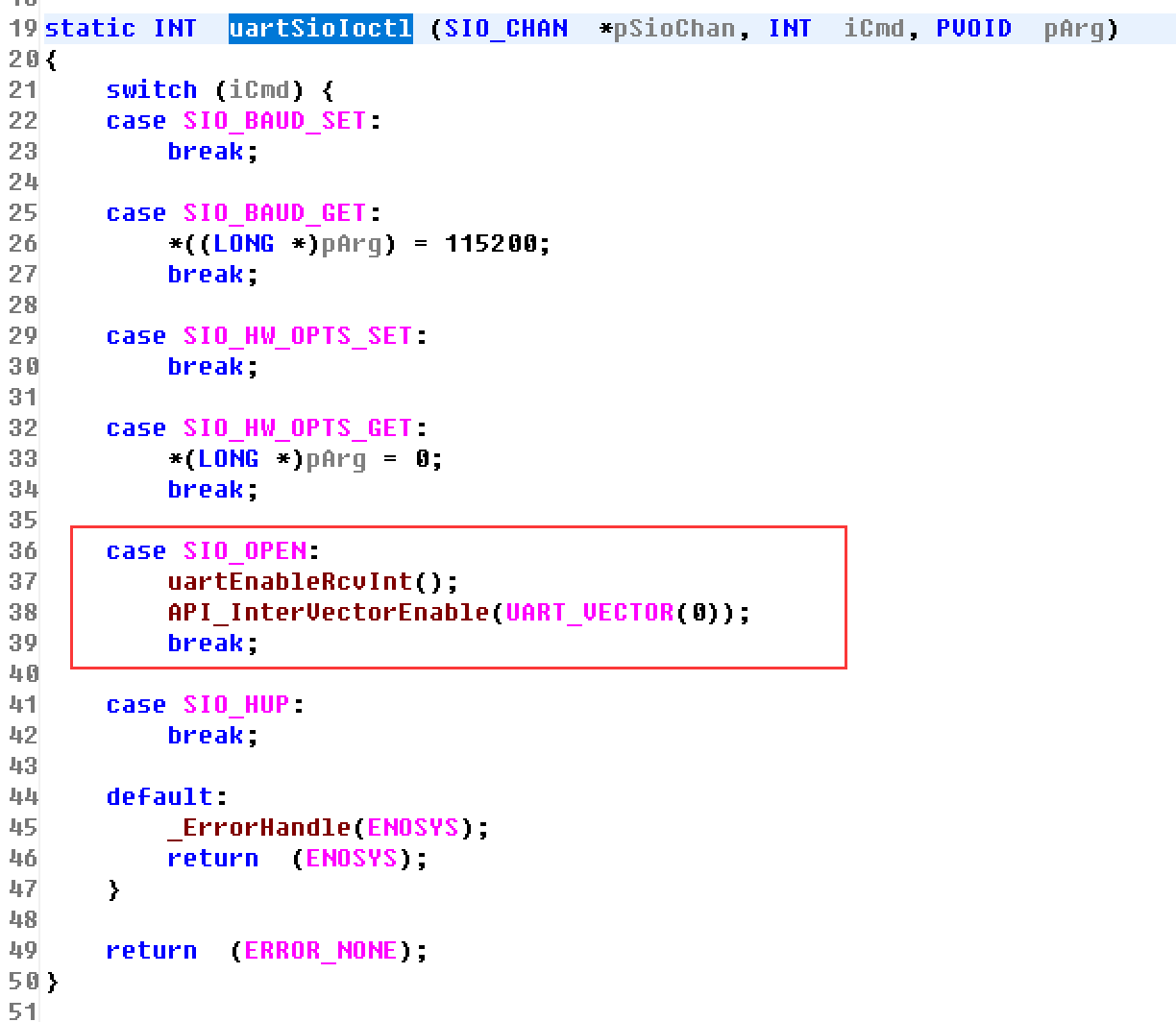
重新编译内核进行引导,这次我们就可以在串口终端上输入命令了:
[root@sylixos:/root]# top
CPU usage checking, please wait...
CPU usage show (measurement accuracy 1.0%) >>
NAME TID PID PRI CPU KERN
---------------- ------- ----- --- ------ ------
t_tshell 4010010 0 150 0.0% 0.0%
t_telnetd 401000e 0 160 0.0% 0.0%
t_ftpd 401000d 0 160 0.0% 0.0%
t_snmp 401000c 0 110 0.0% 0.0%
t_netproto 401000b 0 110 0.0% 0.0%
t_netjob 401000a 0 110 0.0% 0.0%
t_sync 4010009 0 252 0.0% 0.0%
t_reclaim 4010008 0 253 0.0% 0.0%
t_hotplug 4010006 0 250 0.0% 0.0%
t_power 4010005 0 254 0.0% 0.0%
t_log 4010004 0 60 0.0% 0.0%
t_except 4010003 0 0 0.0% 0.0%
t_isrdefer 4010002 0 0 0.0% 0.0%
t_itimer 4010001 0 20 0.0% 0.0%
t_idle0 4010000 0 255 99.9% 0.0%
[root@sylixos:/root]# ps
NAME FATHER STAT PID GRP MEMORY UID GID USER
---------------- ---------------- ---- ----- ----- ---------- ----- ----- ------
kernel <orphan> R 0 0 0KB 0 0 root
total vprocess: 1
[root@sylixos:/root]# ts
thread show >>
NAME TID PID PRI STAT LOCK SAFE DELAY PAGEFAILS FPU CPU
---------------- ------- ----- --- ---- ---- ---- ---------- --------- --- ---
t_idle0 4010000 0 255 RDY 0 YES 0 0 0
t_itimer 4010001 0 20 SLP 0 YES 92274 0 0
t_isrdefer 4010002 0 0 SEM 0 YES 0 0 0
t_except 4010003 0 0 SEM 0 YES 0 0 0
t_log 4010004 0 60 MSGQ 0 YES 0 0 0
t_power 4010005 0 254 SLP 0 YES 446 0 0
t_hotplug 4010006 0 250 SEM 0 YES 439 0 0
t_reclaim 4010008 0 253 MSGQ 0 YES 0 0 0
t_sync 4010009 0 252 SLP 0 425 0 0
t_netjob 401000a 0 110 SEM 0 YES 0 0 0
t_netproto 401000b 0 110 MSGQ 0 YES 23 0 0
t_snmp 401000c 0 110 MSGQ 0 YES 0 0 0
t_ftpd 401000d 0 160 MSGQ 0 0 0 0
t_telnetd 401000e 0 160 MSGQ 0 YES 0 0 0
t_tshell 4010010 0 150 RDY 1 0 0 0
thread: 15
[root@sylixos:/root]#
我们还可以通过ints 命令来查看系统的中断情况:
[root@sylixos:/root]# ints
interrupt vector show >>
IRQ NAME ENTRY CLEAR ENABLE RND PREEMPT PRIO CPU 0
---- -------------- -------- -------- ------ --- ------- ---- -------------
32 uart_isr 40000b8c 0 true 0 23
50 tick_timer 40000400 0 true 0 15687
interrupt nesting show >>
CPU MAX NESTING IPI
----- ----------- -------------
0 1 0
[root@sylixos:/root]#
通过cat /proc/cpuinfo 来查看当前平台的基本信息,可以看出现在使用的是单核状态:
[root@sylixos:/root]# cat /proc/cpuinfo CPU : Allwinner R16, Quad-core Cortex-A7 Up to 1.2GHz CPU Family : ARM(R) 32-Bits CPU Endian : Little-endian CPU Cores : 1 CPU Active : 1 PWR Level : Top level CACHE : 128KBytes(D-32K/I-32K) L1-Cache per core,512KBytes L2-Cache PACKET : ClockworkPI (CPI v3.1) development board BogoMIPS 0 : 2000.00 [root@sylixos:/root]#
2021年7月2日 09:46 1F
感谢🙏 作者,太强了!我在复旦微芯片做了一遍成功了!